
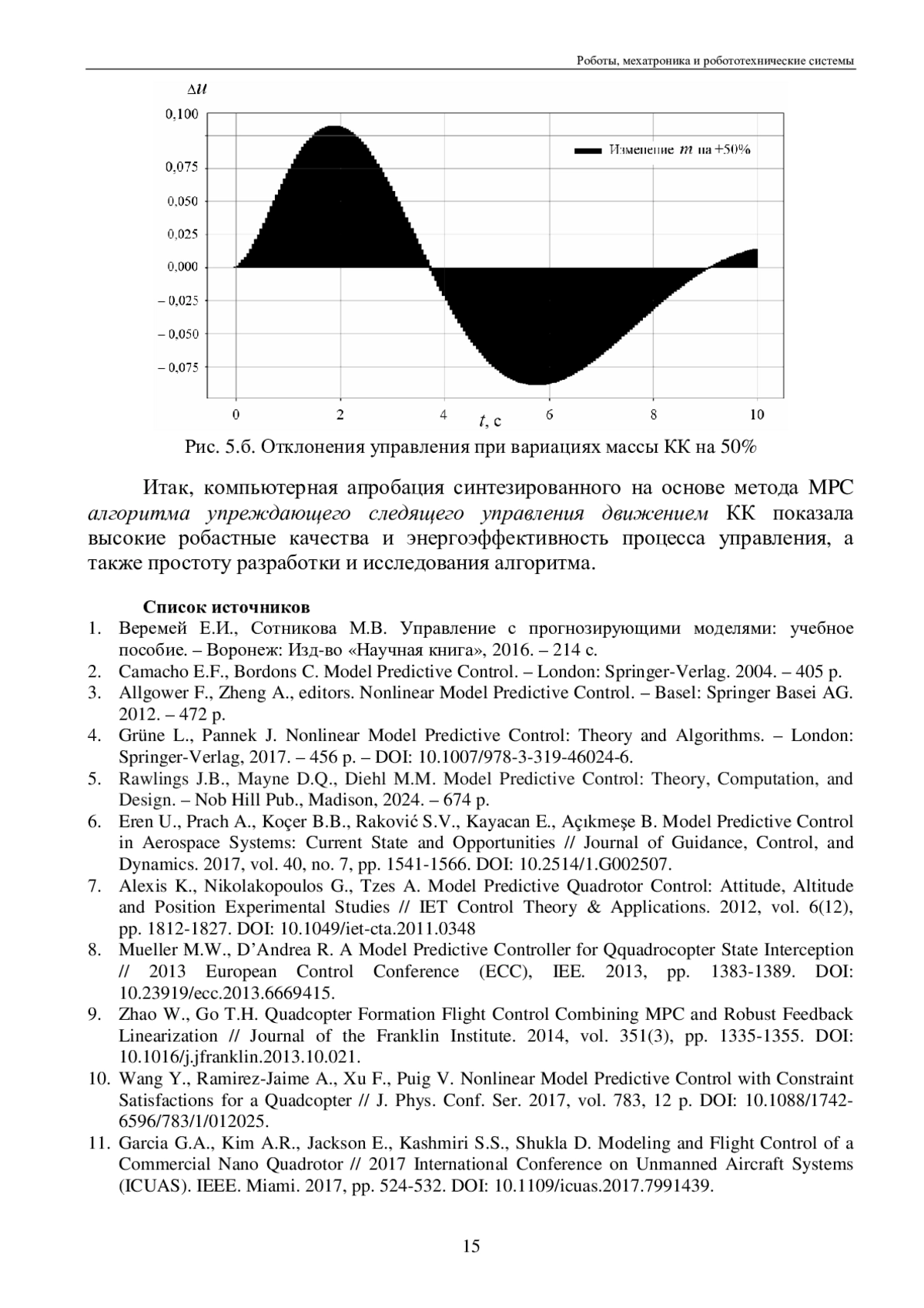
Статья посвящена компьютерному анализу эффективности алгоритма упреждающего следящего управления движением квадрокоптера в условиях параметрических возмущений модели его динамики. Синтез алгоритма упреждающего управления квадрокоптером основан на одном из перспективных методов современной теории управления – методе управления с прогнозирующими моделями (MPC – Model Predictive Control). Эффективность синтезированного алгоритма управления анализируется методом компьютерной апробации в среде Python с параметрическим возмущением массы квадрокоптера.
Предпросмотр статьи

Идентификаторы и классификаторы
В современной теории и практике автоматического управления все большую популярность приобретают стратегии управления с прогнозом, обладающие способностью на основе информации о динамике управляемого объекта предвосхищать его будущее поведение. Данные стратегии управления исходят из принципа, который наиболее лаконично отражает известное изречение Наполеона I (B. Napoléon): «Управлять – значит предвидеть». В связи с этим одним из наиболее перспективных и востребованных методов современной теории автоматического управления является метод управления с прогнозирующей моделью (Model Predictive Control, MPC), разработанный в 60- 80-х годах прошлого столетия [1-5].
Список литературы
1. Веремей Е.И., Сотникова М.В. Управление с прогнозирующими моделями: учебное пособие. – Воронеж: Изд-во «Научная книга», 2016. – 214 с.
2. Camacho E.F., Bordons C. Model Predictive Control. – London: Springer-Verlag. 2004. – 405 p.
3. Allgower F., Zheng A., editors. Nonlinear Model Predictive Control. – Basel: Springer Basei AG. 2012. – 472 p.
4. Grüne L., Pannek J. Nonlinear Model Predictive Control: Theory and Algorithms. – London: Springer-Verlag, 2017. – 456 p. – DOI: 10.1007/978-3-319-46024-6.
5. Rawlings J.B., Mayne D.Q., Diehl M.M. Model Predictive Control: Theory, Computation, and Design. – Nob Hill Pub., Madison, 2024. – 674 p.
6. Eren U., Prach A., Koçer B.B., Raković S.V., Kayacan E., Açıkmeşe B. Model Predictive Control in Aerospace Systems: Current State and Opportunities // Journal of Guidance, Control, and Dynamics. 2017, vol. 40, no. 7, pp. 1541-1566. DOI: 10.2514/1.G002507.
7. Alexis K., Nikolakopoulos G., Tzes A. Model Predictive Quadrotor Control: Attitude, Altitude and Position Experimental Studies // IET Control Theory & Applications. 2012, vol. 6(12), pp. 1812-1827. DOI: 10.1049/iet-cta.2011.0348
8. Mueller M.W., D’Andrea R. A Model Predictive Controller for Qquadrocopter State Interception // 2013 European Control Conference (ECC), IEE. 2013, pp. 1383-1389. DOI: 10.23919/ecc.2013.6669415.
9. Zhao W., Go T.H. Quadcopter Formation Flight Control Combining MPC and Robust Feedback Linearization // Journal of the Franklin Institute. 2014, vol. 351(3), pp. 1335-1355. DOI: 10.1016/j.jfranklin.2013.10.021.
10. Wang Y., Ramirez-Jaime A., Xu F., Puig V. Nonlinear Model Predictive Control with Constraint Satisfactions for a Quadcopter // J. Phys. Conf. Ser. 2017, vol. 783, 12 p. DOI: 10.1088/1742- 6596/783/1/012025.
11. Garcia G.A., Kim A.R., Jackson E., Kashmiri S.S., Shukla D. Modeling and Flight Control of a Commercial Nano Quadrotor // 2017 International Conference on Unmanned Aircraft Systems (ICUAS). IEEE. Miami. 2017, pp. 524-532. DOI: 10.1109/icuas.2017.7991439.МАиР. – 2025. – №15
12. Нимирич Н.С., Филимонов Н.Б. Робастное следящее управление движением квадрокоптера методом «глубокой» обратной связи // Journal of Advanced Research in Technical Science. – 2024. – №43. – С. 42-54. – DOI: 10.26160/2474-5901-2024-43-42-54.
13. Солодовников В.В., Филимонов Н.Б. Динамическое качество систем автоматического регулирования: уч. пособие. – М.: МВТУ, 1987. – 84 с.
14. Khadija E.H., Mostafa M., Abdeljalil E., Hassan A. Neural Network and Fuzzy-logic-based PID Control for Quadcopter Path Tracking // Studies in Informatics and Control. 2019, vol. 28(4), pp. 401-412. DOI: 10.24846/v28i4y201904.
Выпуск
Другие статьи выпуска

В статье рассматривается разработанная при участии авторов экосистема дополнительного образования, включающая набор цифровых инструментов, помогающих автоматизировать основные процессы. Акцент дается на АИС Допобразование, как основной системе, разработанной при непосредственном участии авторов и консолидирующей все процессы, происходящие в учебном заведении дополнительного образования.

В быстро развивающейся сфере научных исследований способность эффективно собирать и анализировать данные приобретает существенное значение. В этой связи возникает потребность в разработке программы (бота), выполняющей рутинные операции по извлечению данных со страниц определенного сайта и формированию из них текстового документа, например, в формате MS Word. Автоматизация процесса сбора данных позволяет исследователю сосредоточить усилия на интеллектуальной работе. В статье рассматривается, методика применения Selenium и Python для автоматизации сбора данных и оптимизации исследовательских процессов.

Необходимость преодоления языкового барьера при обучении иностранных студентов в российских вузах связана со сложностью изучаемого материала и его спецификой. Особенно четко это проявляется в техническом вузе при изучении профессиональной терминологии базовых и профильных дисциплин. Решению проблемы способствует создание адаптированных обучающих материалов для иностранных студентов. Описано применение информационных технологий и использование программы Figma как инструмента по созданию интерактивных материалов, способствующих усвоению терминологии за счет включения гиперссылок, позволяющих мгновенно обращаться к родному языку, находить нужное значение и запоминать его русский эквивалент. Приведены примеры использования программы при подготовке адаптированных материалов базовой и профильной дисциплин технического вуза.

Настоящее время – это время информационного общества, когда многие процессы жизнедеятельности человечества автоматизированы, а применяемые информационные технологии позволяют получать и обрабатывать большие данные, что позволяет человеку делать выводы на основе анализа очень большого объема информации, которые постоянно обновляется. Вместе с определенными возможностями информационное общество предъявляет к человеку и высокие требования по владению информационными технологиями. Для решения многих современных задач по обработке данных человеку может помочь искусственный интеллект. В связи с этим искусственный интеллект постепенно проникает во многие сферы жизни человека. Сфера образования не может оставаться в стороне и также должна отвечать на требования современности – применения искусственного интеллекта в процессе обучения. Поэтому знание основ искусственного интеллекта и его возможностей является неотъемлемой составляющей современного преподавателя. В данной статье описаны основные понятия, связанные с искусственным интеллектом, приведены основные возможности их применения в процессе организации учебного процесса в школе и в вузе.

Рассмотрена задача об определении предельной нагрузки при растяжении композитных стержней с различной укладкой волокон. Для этого композита построены определяющие соотношения на основе нелинейно-упругой модели поведения материала с диаграммой, имеющей экстремум. Были рассмотрены два численных подхода для решения нелинейно-упругой задачи: метод секущих жесткостей (метод Биргера) и метод последовательных догружений (метод Петрова). При этом использовался метод конечных элементов для плоского-напряженного состояния.

Рассматривается задача стабилизации вертикального ротора в электромагнитных подшипниках как задача двухкритериальной оптимизации с функционалами, представляющими собой обобщенные H2-нормы, характеризующие максимальные отклонения ротора от равновесного положения и максимальные значения управлений по отношению к неизвестным возмущениям. Приводятся результаты численного решения системы, замкнутой децентрализованным регулятором.

В статье рассматривается вопрос оптимального управления связанными объектами при неизвестных внешних возмущениях, принадлежащих классу L2. Формулируется многокритериальная задача поиска управления в форме обратной связи, где в роли критериев выбраны максимальные деформации каждого объекта, а также максимальное управляющее воздействие, описываемые как функции времени и принадлежащие классу L∞. Показаны результаты применения алгоритма в общем случае (при наихудшем возможном возмущении) и частном случае (для конкретного возмущения).

Предложена новая схема плоской фермы с возвышением ее средней части. Получена окончательная зависимость первой частоты собственных колебаний узлов фермы от ее размера, массы и количества панелей. Сравнение с приближенным численным решением, полученным с учетом всех степеней свободы конструкции, показало хорошую точность найденной формулы.

Рассмотрены методы сбора данных для анализа состояния серверного кластера на основе мониторинга ключевых параметров и балансировки нагрузки. Предложен подход к сбору и анализу метрик, таких как использование CPU, RAM, сетевая активность и время отклика, с использованием современных инструментов. Описаны основные параметры, влияющие на устойчивость кластера, и предложены новые производные метрики для более глубокого анализа. Представлены примеры входных данных, построены графики и рассмотрено применение этих метрик в реальных сценариях. Результаты исследования демонстрируют эффективность предложенного подхода для повышения надежности распределенных систем.

При автоматизированном конструировании поверхностей технических изделий важен процесс создания их математической модели, позволяющий управлять формой неосциллирующих кривых-обводов высокого порядка гладкости по заранее заданным геометрическим и дифференциальным условиям на отдельном участке поверхности. Решение задач интерполирования выпуклой кривой позволяет решать многовариантные оптимизационные задачи по выбору наилучших технических решений.

В статье исследуется потенциал биосенсоров для раннего выявления осложнений после эндопротезирования. Рассматривается способность этих датчиков обнаруживать и измерять биомаркеры, которые указывают на воспалительные процессы и инфекции в организме. В исследовании также анализируется потенциальная интеграция биосенсоров в послеоперационный уход и ее влияние на результаты лечения и качество жизни пациентов.

В статье рассматриваются особенности построения интеллектуальных систем управления беспилотными транспортными средствами на основе компьютерного зрения и применения лазерных лидаров. Анализируется работа систем управления автономным вождением в сложных недетерминированных условиях. Рассматривается возможность применения в лазерных лидарах мультиспектрального твердотельного лазера на основе композитного керамического ИАГ: Nd3+ / ИАГ: Cr4+-элемента.

В статье рассматривается необходимость построения эффективных информационных систем на сложно структурированных предприятиях. В эпоху массовой цифровизации это становится условием эффективного многокомпонентного управления и бизнес-аналитики. Автором приводятся наиболее весомые критерии и условия для эффективной цифровой трансформации и проводится обсуждение технологий, которые станут ключевыми элементами на пути к цифровой трансформации.

Проведение дисперсионного анализа предусмотрено во многих статистических программных комплексах. Однако в большинстве случаев подобная реализация ограничена случаем перекрёстной классификации по модели фиксированных эффектов. В тоже время пользователю иногда требуется выполнить дисперсионный анализ иерархической классификации с одним или большим числом случайных факторов. В статье описан способ проведения подобного анализа с использованием популярного программного комплекса STATISTICA компании StatSoft.

Рассмотрено совместное применение как традиционных, так и современных методов исследования формовочных материалов, что позволит более глубоко понять механизмы взаимодействия между формовочными материалами и жидким металлом. Работа направлена на комплексное исследование методов и технологий, связанных с формовочными материалами и противопригарными покрытиями, что позволит внести значительный вклад в развитие данной области и повысить эффективность производственных процессов в металлургии и смежных отраслях.

В статье рассматриваются системы автоматического регулирования подвески автомобиля, представлены их преимущества и недостатки, а также конструктивные особенности и типы таких систем. Предложенная схема системы автоматического регулирования подвески позволяет в режиме реального времени изменять параметры подвески автомобиля, что в свою очередь повышает эксплуатационные и потребительские свойства автомобиля.

Рассмотрена математическая модель процесса управления передним углом режущего клина на токарных операциях отрезки, проведен синтез системы управления, обеспечивающий требуемые показатели качества ее реакции на периодические процессы образования и схлопывания поверхностей сдвига при стружкообразовании. На основании проведенных исследований подтверждена возможность и перспективность создания «интеллектуального» инструмента, использующего управление передним углом его режущего клина в зависимости от условий резания.

В статье предложен метод расчета агрегированного критерия оценки качества моделей регрессии на основе комплексного учета множества показателей. Для определения весовых коэффициентов значимости отдельных критериев применен экспертный подход с использованием метода парных сравнений по шкале Саати. Предложенный подход позволяет преодолеть недостатки применения отдельных традиционных критериев оценки качества моделей, которые не всегда обеспечивают адекватную оценку пригодности модели для практического использования. Метод может быть использован как основа для автоматической процедуры синтеза регрессионных моделей в задачах предиктивного анализа характеристик технических систем, а также в задачах ситуационного моделирования и диагностики состояния оборудования. Показана возможность применения агрегированного критерия качества модели как индикативного показателя для выявления событий (смены ситуации, неисправностей оборудования).

В данном исследовании приведены результаты изучения мирового и отечественного опыта в области оптимизации процессов рудоподготовки полиметаллического минерального сырья. Методы исследования, использованные при обработке информации включали дедукцию, анализ и синтез. В результате исследования установлено, что наиболее распространенным подходом оптимизации процессов рудоподготовки является модернизация технологической схемы с использованием современных энергоэффективных технологий. Выявлено, что из-за высокой сложности и дороговизны данных процессов, наибольший потенциал оптимизации заключается во внедрении цифровых технологий.

В статье рассматриваются адаптивные колёсные движители, представлены их преимущества и недостатки применительно к конструкции мобильных энергетических средств (МЭС), оборудованных шинами сверхнизкого давления. Предложенная схема автоматизации адаптивных колёсных движителей, которая позволит создавать умные и производительные мобильные энергетические средства с использованием искусственного интеллекта.

В статье показано определение технологических возможностей зубодолбежного станка. Найдены параметры технической характеристики станка, определяющие получаемые размеры модулей поверхностей. Размеры модулей поверхностей зависят от наибольшего модуля нарезаемого колеса. Установлено, что точность изготовляемых на станке модулей поверхностей зависит от класса точности станка и метода обработки

Статья посвящена использованию 3D сканеров в современных производственных и инженерных процессах. Рассматриваются преимущества сканеров, такие как высокая точность, скорость и снижение затрат на проектирование. Подробно описаны этапы разработки методики сканирования: выбор оборудования, подготовка объекта, процесс сканирования и обработка данных. Особое внимание уделено сканеру Scanform L5, который отличается мобильностью и точностью, обеспечивая качественное сканирование в различных условиях.

В данной работе рассматривается задача разработки расчётной схемы для пневмогидравлического привода, анализа и обоснования параметров, для обеспечения эффективной и надежной работы системы. Разработаны рекомендации по выбору типа пневмогидравлического привода, в зависимости от поставленной задачи. Предложены критерии для подбора оборудования и выбора исходных параметров для пневмогидравлических приводов и гидравлических приводов с пневмогидравлическим мультипликатором давления.

В статье представлены результаты разработки принципиально нового реконфигурируемого роботизированного агрегата со сменными базовыми модулями для некоторых технологических процессов возделывания овощных культур для селекции и семеноводства, обеспечивающих достижение требуемых показателей эффективности в соответствии с агротехническими требованиями возделываемых овощных культур и условиями эксплуатации сельхозмашин.

В статье рассматриваются современные методы автоматизации производства элементов экстерьера сельскохозяйственной техники с использованием полимерных композитов. Описаны ключевые технологические процессы, такие как вакуумная формовка, контактное формование и RTM-инфузия, применяемые для изготовления внешних элементов конструкций. Особое внимание уделяется системам автоматического контроля, позволяющим оптимизировать процесс, снизить производственные затраты и повысить качество изделий. Практическая значимость работы заключается в демонстрации эффективности интеграции автоматизированных решений в производство экстерьерных деталей сельскохозяйственной техники, что способствует повышению конкурентоспособности продукции на современном рынке.

Рассмотрены вопросы разработки концепции автомата патронирования агрессивных жидкостей и возможности роботизации буровзрывных работ на этой основе. Сформулированы общие требования и система ограничений для выполнения проекта. Приведены функциональная схема установки, состав основных элементов и датчиков, спецификация заказа на изготовление. Даны экспертные оценки стоимости изготовления опытных образцов и временные параметры реализации проектов установки и роботизированного комплекса.

В работе рассматривается задача равномерного покрытия лесных территорий для их мониторинга с использованием БПЛА. Предложен модифицированный алгоритм генерации шестиугольной сетки, обеспечивающий полное покрытие. Приведены результаты тестирования, подтверждающие его преимущества перед традиционными методами. Отмечена возможность его использования при построении сенсорных сетей и планировании маршрутов БПЛА.

Арктика является климатически суровым и труднодоступным краем, транспортное перемещение по территории которого несет множество опасностей для человека. Использование высокоавтоматизированных транспортных средств позволит оптимизировать человеческий труд и сократить вероятность несчастных случаев на опасных участках движения транспорта. Также предложены способы улучшения работы интеллектуальной транспортной системы в Арктической зоне РФ путем применения системы C-V2X, а также протоколов X.509.

Стартовые устройства с торообразными разгонными механизмами позволяют осуществлять запуск объектов различного назначения и типоразмеров. Параметрическими исследованиями, анализом работы пневматического спускового механизма стартового устройства установлено, что в процессе его работы в торцевой полости возникает давление разрежения воздуха, негативно влияющее на скоростные параметры устройства. Предложено устранить данный недостаток путем установки обратного клапана, соединяющего торцевую камеру с атмосферой на этапе разгона запускаемого объекта. Промышленная применимость и эффективность технического решения подтверждена натурными экспериментами.

Проведен анализ конструкций карданных шарниров неравных угловых скоростей и предложена конструкция нового карданного шарнира с демпфирующими шипами крестовины, обеспечивающего компенсацию неравномерности распределения нагрузки тел качения подшипников при перекосе крестовины при работе карданного шарнира за счет равномерного одновременного поворота параллельно работающих шипов крестовины.

Объектом исследования является плоская модель статически определенной симметричной ферменной системы. Используя формулу Максвелла-Мора, находится матрица жесткости конструкции. Используя формулу Донкерлея, два упрощения формул Донкерлея и Рэлея для произвольного количества панелей, находится первая собственная частота колебаний фермы. Результаты аналитического метода сравниваются с результатами численного метода. Проведен анализ частотного спектра фермы и сделаны выводы о зависимости частоты от размера панелей.

Статья посвящена исследованию адаптивных тормозных систем грузовых вагонов, направленных на устранение ключевых недостатков традиционной рычажной передачи. Рассматривается переход на технологию потележечного торможения, позволяющую равномерно распределять усилие между тележками, а также внедрение цифровых решений. Предложены инновационные методы, включая пневмоэлектрические приводы с автоматической регулировкой, распределенную систему мониторинга (датчики вибрации, ИКпирометры) и алгоритмы машинного обучения для прогнозирования износа колодок. Результаты моделирования демонстрируют снижение неравномерности нажатия колодок с 22% до 5%, повышение точности прогноза остаточного ресурса до 92% и сокращение эксплуатационных рисков. Исследование подтверждает эффективность интеграции цифровых технологий и адаптивных механизмов для повышения безопасности и надежности тормозных систем грузовых вагонов.

На данный момент актуальность вопросов управления беспилотными летательными аппаратами сложно переоценить – от них зависит не только промышленное и технологическое развитие страны, но и ее безопасность. Обзор литературных источников по данной тематике направлен на рассмотрение современных подходов к разработке алгоритмов управления беспилотными летательными аппаратами и обусловлен необходимостью систематизации наработок в данной области. В контексте данной проблемы затронута история развития беспилотными летательными аппаратами, выделены наиболее значительные ее моменты. Кратко рассмотрены возможности применения в различных отраслях промышленности. Данные литературных источников показывают, что за последнее время произошло смещение интересов от теоретического программирования до вопросов их практического применения в военных целях. Мы ограничились анализом литературных данных за последние 20 лет, в которых освещены вопросы разработки алгоритмов адаптивных систем управления, затронули теоретически вопросы и некоторые аспекты применения нечеткой логики искусственного интеллекта при разработке алгоритмов управления беспилотными летательными аппаратами в условиях неопределенности. Сделаны выводы, что нечеткая логика существенно превосходит по улучшению управления аппаратами, а в сочетании с самообучаемыми нейросетями широко применяется для управления беспилотными летательными аппаратами, в том числе для управления группой объектов. Преодоление всех существующих проблем данных подходов находится в стадии разработки: появляются новые пути решения, математические модели и алгоритмы работы. Современные адаптивные системы управления значительно повышают точность и надежность управления летательными аппаратами в динамически изменяющихся условиях полета. Интеграция машинного обучения и нечеткой логики в системы управления позволяет оптимизировать реакцию летательного аппарата на неопределенные внешние воздействия (изменение погодных условий, технические неисправности, изменения аэродинамических характеристик, воздействие враждебных средств противодействия). Для экспериментального подтверждения различных гипотез широко применяют методы компьютерного моделирования, например, для имитации различных условий полета, проверки адаптивности системы управления. При этом используют математические методы анализа.

В статье формализуется таксономия шаблонов проектирования на основе нейронных суррогатных программных моделей. Описывается методология программирования относительно общей для всех шаблонов проектирования программ. Исследование закладывает фундамент для нового класса рабочих процессов инженеров-программистов, основанных на программировании с использованием суррогатов программ.

В статье рассматривается подход к выявлению противоречий между нормативными документами на естественном языке с использованием методов искусственного интеллекта. Внедрение «умных» стандартов, которые позволяют машинам автоматически понимать и применять нормативные требования, является важным этапом цифровой трансформации, однако на практике интеграция таких стандартов с традиционными нормативными документами неизбежна. При этом наличие противоречий между разными стандартами существенно усложняет их автоматическое применение и вызывает сбои в работе информационных систем. Автором предлагается новый подход к автоматизированному выявлению потенциальных противоречий, основанный на кластеризации текстовых данных с последующим анализом дисперсии эмбеддингов нормативных положений. Используется модель больших языковых эмбеддингов «text-embedding-ada-002», что позволяет преобразовать тексты в семантические векторные представления. Далее применяются методы кластеризации и количественный анализ внутрикластерной дисперсии, а также метрика оптимального транспорта (Earth Mover’s Distance) для оценки различий между группами нормативных положений. Проведённые эксперименты на синтетических данных показали, что предложенный подход способен выявлять более 70% искусственно внесённых противоречий, однако выявлено значительное количество ложноположительных результатов, обусловленных влиянием различий в структуре и мета-данных документов. Полученные предварительные результаты демонстрируют возможность автоматизированного выделения областей потенциальных противоречий для последующего экспертного анализа. Практическая значимость работы заключается в создании программного решения, позволяющего автоматизировать поиск противоречий в больших массивах нормативной документации и обеспечить корректность взаимодействия как между системами, так и между человеком и машиной. Материалы статьи будут полезны разработчикам интеллектуальных систем автоматизации нормативной документации и специалистам, занимающимся цифровой трансформацией в сфере стандартизации.

В данной работе представлена методика автоматизированной классификации нормативной документации на основе кластеризации эмбеддингов. Актуальность исследования обусловлена значительным объемом нормативных документов в промышленности и информационных технологиях, что затрудняет их систематизацию и анализ. Предложенный подход включает этапы предобработки текстов, извлечения эмбеддингов, кластеризации с использованием агломеративного метода и интерпретации результатов с помощью генеративных языковых моделей. В ходе экспериментов проведена оценка различных моделей для векторизации текстов, а также выполнена кластеризация с применением косинусной метрики. Результаты показали, что метод обеспечивает высокую точность выделения тематических групп, превосходя традиционные алгоритмы на основе частотного анализа (BoW, TF-IDF).

Данная статья посвящена вопросу эффективного управления трудовыми ресурсами в организации на основе методов предиктивной аналитики. Рассматриваются тенденции современного рынка в контексте проведения эмпирических исследований человеческого капитала. Ввиду малого распространения прогностического подхода и упору на реактивные модели предлагается общая методология для структурирования практической аналитики в компании с использованием алгоритмов машинного обучения, даются рекомендации по ее внедрению.

В статье рассматривается проблема оптимизации производительности систем искусственного интеллекта в реальном времени. Предложена гибридная архитектура мониторинга, сочетающая традиционные методы с машинным обучением. Проведено экспериментальное исследование, показавшее повышение производительности на 25-30% и снижение затрат на инфраструктуру на 25%. Результаты могут применяться для масштабирования существующих ИИ-систем.

Приведены сведения о содействии проектам развития интеллектуальной экономики, оснащенной Искусственными Интеллектами. Статья призвана способствовать вдохновению к инвестированию в исследования и приложения Искусственного Интеллекта. Актуализирована диалектика явления «Искусственный интеллект и антропоморфизм», введен и обоснован постулат «Искусственный Интеллект – участник духовного производства». Предпринята презентация терминов «Интеллект – роботизированные производства», «Антропоморфизм психотипов искусственного интеллекта», «Психотип искусственного интеллекта».

Предложен гибридный подход по распознаванию действий человека-оператора в коллаборативных роботизированных средах, сочетающий методы компьютерного зрения и большие языковые модели. Разработана модифицированная метрика WSAA, позволяющая оценивать полученные результаты с учетом точности и адаптивности модели. Наилучшие результаты показала модель Llama3.2-Vision, продемонстрировав высокую точность распознавания и устойчивость к изменениям в условиях окружающей среды. Предложенный подход может быть применен для повышения эффективности взаимодействия человека и робота в промышленных условиях.

В статье описывается управление машиностроительного производств с использованием искусственных глубоких нейронных сетей, входящих в модели дискретного выбора и в модель симуляции физических процессов управления производством. Такие гибридные системы автоматического управления производством намного эффективно и качественно управляют процессами и техническими объектами на производстве

В настоящей работе приведен анализ кинематических координат мехатронного профилографа при движении датчика измерения по окружности, предназначенного для измерения профилей поверхностей изделий. В работе рассмотрены возможные траектории движения мехатронного профилографа и приведен кинематический анализ для одной из траекторий – движению датчика по окружности. В ходе работы получены зависимости кинематических характеристик датчика от характеристик двигателей при движении по окружности с обеспечением постоянства абсолютной скорости выходного звена.

В настоящей работе приведено решение прямой и обратной задачи о скоростях мехатронного профилографа, предназначенного для измерения профилей поверхностей изделий. В ходе работы получены зависимости кинематических характеристик датчика (линейной и угловой скорости) от кинематических характеристик двигателей, тем самым решена прямая задача о скоростях, а также решена обратная задача о скоростях, заключающаяся в определении характеристик двигателей через скорости выходного звена.

В статье приведены результаты высокотемпературных испытаний углеродуглеродного материала «Арголон-2D», поверхность трения которого модифицирована селеном, политетрафторэтиленом и теллуром. Модификаторы поверхности трения материала «Арголон- 2D» улучшают антифрикционные свойства, уменьшают значение коэффициента трения. В диапазоне температур 20…500°С привлекательными является модификатор (Se-ПТФЭ), которые обеспечивают значения коэффициента трения в диапазоне 0,09…0,20. При скорости 0,16 м/с и температуре 500°С коэффициент трения у материала «Арголон-2D»+(Se-ПТФЭ) ниже на 88%, чем у материала «Арголон-2D», а коэффициент трения материала «Арголон- 2D»+Te ниже на 36% соответственно.

В статье проводится анализ научно-технических работ, связанных с областью точности позиционирования роботизированных систем. В найденных работах выявляются основные факторы, влияющие на точность позиционирования роботов, а также приводятся способы устранения таких факторов. Полученные в ходе проведения анализа результаты будут использованы в дальнейшем при разработке нового подхода к обеспечению точности позиционирования роботизированных систем.

В данной статье проанализировано текущее состояние развития технологий реабилитационных роботов. Было выявлено, что существующие реабилитационные роботы попрежнему обладают недостаточной точностью управления, адаптивностью и податливостью. Для устранения недостаточной податливости и слабой робастности, характерных для управления реабилитационными роботами для нижних конечностей, предложена составная стратегия управления, основанная на управлении скользящим режимом сверхспирального типа (ST-SMC) и адмитансном контроллере. Податливое следование скорости обеспечивается с помощью адмитансного контроллера, а подавление сил трения и внешних возмущений осуществляется за счет ST-SMC, что повышает точность и стабильность управления системой. На основе экспериментальных результатов показано, что предложенная стратегия позволяет эффективно устранить фазовое отклонение скорости, наблюдаемое при традиционном адмитансном управлении, а также значительно улучшает податливость и робастность системы.

В данной статье будет рассмотрена классификация способов, с помощью которых можно управлять роботехническими системами, имеющими в составе соединительных узлов гибкие элементы. Будет проанализирована проблема, возникающая при движении роботов с гибкой мехатроникой и разработаны путь решения, направленный на достижения точности позиционирования, компенсацию деформаций и минимизацию нежелательных колебаний.

Статья посвящена анализу программного обеспечения, как ключевого компонента автоматизированных систем управления наземных транспортно-технологических средств. Представлена классификация программного обеспечения. Приведены сравнительные таблицы классов программного обеспечения, а также рассмотрены перспективы и сложности с программным обеспечением, предназначенным для управления группами наземных транспортно-технологических средств в рамках многоагентных систем.

В данной статье будут рассмотрены гибкие сенсоры: принцип работы, возможности применения в бионических протезах. Приведены материалы, используемые при создании датчиков, также освещается тема, связанная с тактильной чувствительностью на примере специального покрытия e-dermis. Рассматривается применение адаптивных протезных систем их преимущества и проблемы, возникающие при их разработке.

Универсальные шарнирные роботы являются инструментальной основой гибких производственных ячеек, которые определяют современный уклад производства и технически обеспечивают вариативное изготовление большой номенклатуры изделий с широким диапазоном типоразмеров. Универсальный робот поставляется как отдельная единица технологического оборудования и может быть оснащен богатым спектром рабочих органов, инструментов и захватных устройств. В данной работе разработано захватное устройство с червячной передачей для робота Kawasaki, которое отличается повышенной точностью за счет минимизации зазоров и возможностью адаптивно захватывать объекты разной формы. Разработанное устройство является отдельным изделием и может быть использовано с любым другим роботом с аналогичной повышенной грузоподъемностью. Разработанная методика проектирования пригодна для конструирования различных захватных устройств и включает алгоритмическую часть, связанную с подключением и управлением.
Статистика статьи
Статистика просмотров за 2025 год.
Издательство
- Издательство
- НИЦ МС
- Регион
- Россия, Санкт-Петербург
- Почтовый адрес
- г Санкт-Петербург, Приморский пр-кт
- Юр. адрес
- г Санкт-Петербург, Приморский пр-кт
- ФИО
- Жукова Елена Валерьевна (Индивидуальный предприниматель)
- Контактный телефон
- +7 (___) _______
- Сайт
- http://srcms.ru/