
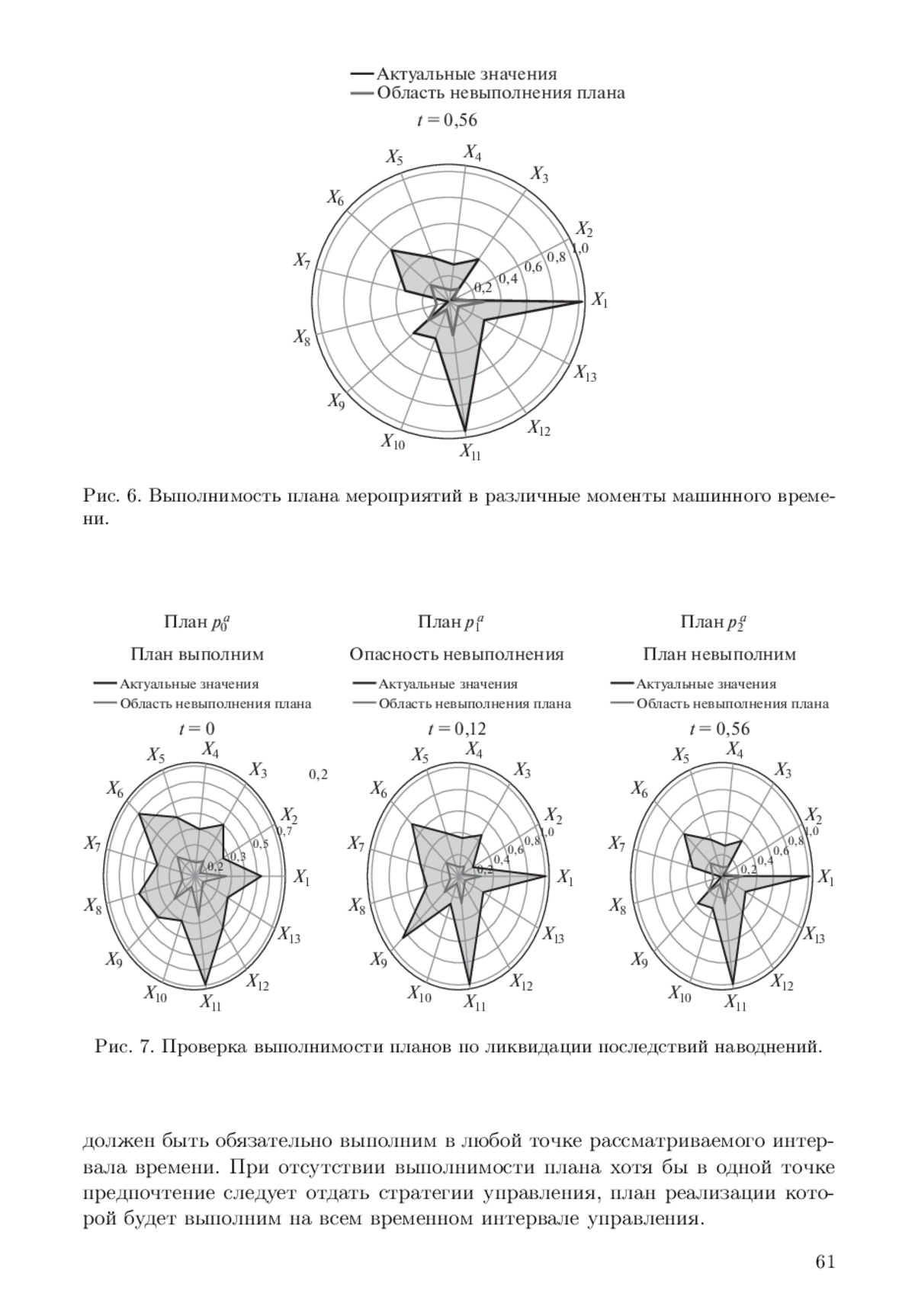
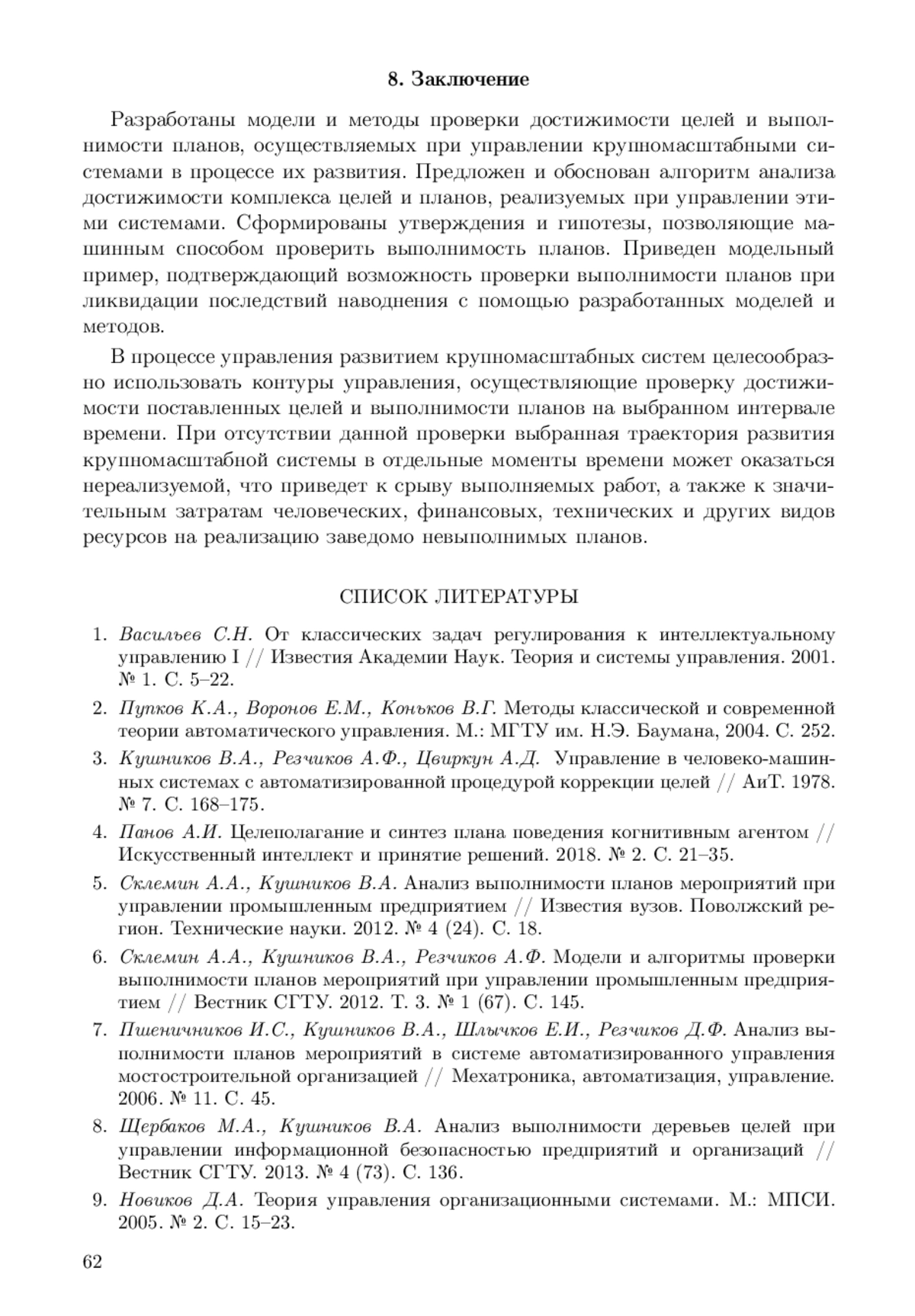
Разработаны модели и методы проверки достижимости комплекса целей и выполнимости планов мероприятий, осуществляемых при управлении крупномасштабными системами. Сформирован алгоритм анализа достижимости целей и планов, реализуемых в процессе развития этих систем. Приведен пример, иллюстрирующий основные этапы проверки достижимости комплекса целей и выполнимости планов мероприятий при ликвидации последствий наводнения.
Предпросмотр статьи
Идентификаторы и классификаторы
Вопросам изучения моделей и методов формирования и проверки достижимости поставленных целей при управлении сложными человеко-машинными, социальными, экономическими и биологическими системами уделяется значительное внимание. В настоящее время проверка достижимости комплекса целей, осуществляемых при планировании, проектировании и управлении крупномасштабными системами, недостаточно формализована и выполняется в основном с использованием интуиции и опыта лиц, принимающих решения (ЛПР). Характеристики целей различных уровней иерархии, а также индикаторов их выполнения могут значительно изменяться на временных интервалах реализации целей, что затрудняет деятельность ЛПР при проектировании, управлении крупномасштабными системами, а также при планиро49 вании результатов их деятельности.
Список литературы
1. Васильев С.Н. От классических задач регулирования к интеллектуальному управлению I // Известия Академии Наук. Теория и системы управления. 2001. № 1. С. 5-22. EDN: MPHVEP
2. Пупков К.А., Воронов Е.М., Коньков В.Г. Методы классической и современной теории автоматического управления. М.: МГТУ им. Н.Э. Баумана, 2004. C. 252. EDN: QMNEIB
3. Кушников В.А., Резчиков А.Ф., Цвиркун А.Д. Управление в человеко-машинных системах с автоматизированной процедурой коррекции целей // АиТ. 1978. № 7. С. 168-175.
4. Панов А.И. Целеполагание и синтез плана поведения когнитивным агентом // Искусственный интеллект и принятие решений. 2018. № 2. С. 21-35. EDN: XQXXVZ
5. Склемин А.А., Кушников В.А. Анализ выполнимости планов мероприятий при управлении промышленным предприятием // Известия вузов. Поволжский регион. Технические науки. 2012. № 4 (24). С. 18. EDN: PWUTQR
6. Склемин А.А., Кушников В.А., Резчиков А.Ф. Модели и алгоритмы проверки выполнимости планов мероприятий при управлении промышленным предприятием // Вестник СГТУ. 2012. Т. 3. № 1 (67). С. 145. EDN: PYPFHD
7. Пшеничников И.С., Кушников В.А., Шлычков Е.И., Резчиков Д.Ф. Анализ выполнимости планов мероприятий в системе автоматизированного управления мостостроительной организацией // Мехатроника, автоматизация, управление. 2006. № 11. С. 45. EDN: KVFFHL
8. Щербаков М.А., Кушников В.А. Анализ выполнимости деревьев целей при управлении информационной безопасностью предприятий и организаций // Вестник СГТУ. 2013. № 4 (73). С. 136. EDN: SEFXSB
9. Новиков Д.А. Теория управления организационными системами. М.: МПСИ. 2005. № 2. С. 15-23.
10. Белов М.В., Новиков Д.А. Управление жизненными циклами организационно-технических систем. М.: URSS, ООО “ЛЕНАНД”. 2020. № 2. С. 123-153.
11. Цвиркун А.Д., Резчиков А.Ф., Кушников В.А., Иващенко В.А., Филимонюк Л.Ю., Богомолов А.С., Хамутова М.В. Управление процессом ликвидации последствий наводнений на промышленных объектах и территориях // Управление большими системами: сборник трудов. 2020. № 83. С. 75-106. EDN: GIBTRY
12. Бродский Ю.И. Лекции по математическому и имитационному моделированию // Ю.И. Бродский. М.-Берлин: Директ-Медиа, 2015. С. 240. EDN: VQEMXX
13. Гейда А.С., Лысенко И.В. Оценивание показателей операционных свойств систем и процессов их функционирования // Труды СПИИ РАН. 2013. № 2 (25). С. 317-337. EDN: PWWQRH
14. Давтян А.Г., Шабалина О.А., Садовникова Н.П., Парыгин Д.С. Моделирование нарративного управления в социально-экономических системах // Вестник МГТУ им. Н.Э. Баумана. Серия Приборостроение. 2022. № 1 (138). С. 85-99. EDN: MIHQFE
15. Яхнин Е.Д. Проблема целеполагания // Вопросы философии. 2020. № 5. С. 5-11. EDN: VDWRNR
16. Костюк Ф.В. От вычисления показателей боевой эффективности до теории исследования операций и неантагонистических игр: научное наследие профессора Юрия Борисовича Гермейера // Известия РАН. Теория и системы управления. 2019. № 2. С. 30-40. EDN: RVKQQL
Выпуск
Другие статьи выпуска

Показана актуальность создания интеллектуальных роботов различного назначения, способных эффективным образом решать сложные многоэтапные задачи целенаправленной деятельности в априори неописанных проблемных средах. Предложены оригинальные по содержанию элементы продукционной модели представления знаний безотносительно к конкретной предметной области. Построенная таким образом модель представления знаний позволяет интеллектуальным роботам автоматически планировать целенаправленную деятельность в условиях неопределенности, опираясь на обобщенное описание возможных закономерностей проблемной среды. Разработаны процедуры автоматического синтеза графа “видимости”, определяющего формальным образом воспринимаемый интеллектуальным роботом участок проблемной среды. Это, в свою очередь, позволяет роботу автоматически формировать локально-оптимальный маршрут целенаправленного перемещения в априори неописанных условиях функционирования. Синтезированы процедуры автоматического планирования интеллектуальным роботом целенаправленной деятельности, связанной с преобразованием текущей ситуации проблемной среды в заданную целевую ситуацию в условиях неопределенности.

Предлагается метод диагностирования линейных динамических систем, описываемых дискретными моделями при наличии внешних возмущений, на основе интервальных наблюдателей. Приводятся соотношения, позволяющие построить интервальный наблюдатель, формирующий два значения невязки так, что если число нуль находится между этими значениями, то дефекты, на обнаружение которых рассчитан наблюдатель, в системе отсутствуют. Случай, когда нуль не попадает между этими значениями, квалифицируется как появление дефекта. Теоретические результаты иллюстрируются примером.

Рассматривается множество обратимых механических систем с колебаниями одного периода и индивидуальными фазовыми сдвигами в них. Решается задача агрегирования связанной системы с притягивающим циклом. Развивается подход с выбором ведущей (управляющей) системы, которая через односторонную связь-управление действует на остальные (ведомые) системы: в агрегированной системе непосредственные связи между ведомыми системами отсутствуют. Применяются универсальные связи-управления. Особое внимание уделяется консервативным системам. Даются возможные сценарии функционирования агрегированной системы.

Анализируется механизм смешанного финансирования мегапроекта, состоящего из нескольких проектов. Одна часть средств на выполнение проекта поступает от руководителя мегапроекта, другая часть от исполнителя проекта. При распределении средств на выполнение проектов руководитель мегапроекта учитывает информацию о размере собственных средств исполнителя на выполнение проекта. Исполнители проектов стремятся получить больше средств от руководителя мегапроекта, в свою очередь, руководитель мегапроекта заинтересован в привлечении большего размера средств от исполнителей проекта. Для достижения этой цели руководитель мегапроекта использует различные процедуры распределения финансовых средств. Соответственно, исполнители проекта для увеличения выделяемых для них средств используют информацию, сообщаемую руководителю мегапроекта. Анализируются процедуры прямых и обратных приоритетов распределения в механизме смешанного финансирования. В ситуации равновесия по Нэшу определяется процедура распределения финансовых средств, которая стимулирует исполнителей проекта выделять больший объем собственных средств на выполнение проекта.

Рассматривается задача стимулирования сокращения продолжительности проекта. Заданы величины сокращения продолжительностей работ проекта и соответствующие затраты. Для компенсации затрат применяется система группового стимулирования. В этой системе все работы разбиваются на группы и для каждой группы применяется унифицированная система стимулирования. Рассмотрены два типа унифицированных систем для групп - линейная и скачкообразная. Задача заключается в разбиении работ на группы и в выборе системы стимулирования для каждой группы так, чтобы суммарный фонд стимулирования был минимален. Предложены алгоритмы решения, в основе которых лежит определение кратчайшего пути в сети. Рассмотрен также ряд частных случаев (разбиение с минимальным числом групп и разбиение с максимальным числом групп).

Рассматриваются задачи построения расписаний работ для предприятий со стапельной сборкой изделий. В состав таких предприятий может входить несколько производственных подразделений, в которых изготавливаются комплектующие, предназначенные для сборки из них на стапелях выпускаемых изделий. Для решения рассматриваемых задач предлагаются методы, позволяющие строить согласованные расписания работ для всех производственных подразделений предприятия.

Рассматриваются задачи управления многономенклатурными запасами в иерархических системах складов при постоянном спросе в условиях ограниченной вместимости складов. Снабжение системы складов может производиться несколькими поставщиками. Для решения этих задач предлагаются модели и методы, позволяющие в соответствии с имеющимся спросом определять время и величину пополнения всех складов, находящихся на различных уровнях такой системы складов.

Изучается влияние расположения аминокислотных остатков в пентапептиде на его устойчивость. Cтроится прогноз устойчивости пентапептида с помощью метода градиентного бустинга, позволяющего оценить влияние каждого признака на стабильность пентапептида. Выявлены комбинации расположения аминокислот в пентапептиде, вносящие существенный вклад в его стабильность. Показано, что использование таких комбинаций позволяет сократить количество данных, необходимых для получения достоверного прогноза стабильности пентапептида.

Для линейных многосвязных непрерывных стационарных устойчивых систем с простым спектром, в том числе в канонической диагональной форме, а также приведенных к каноническим формам управляемости и наблюдаемости, разработан метод и получены аналитические формулы спектральных разложений грамианов в форме различных матриц Сяо. Разработан метод и алгоритм вычисления обобщенных матриц Сяо в виде произведения Адамара для многосвязных непрерывных линейных систем со многими входами и многими выходами. Это позволяет вычислять элементы соответствующих грамианов управляемости и наблюдаемости в виде произведений соответствующих элементов матриц мультипликаторов и матрицы, являющейся суммой всевозможных произведений матриц числителя матричной передаточной функции системы. Новые результаты получены в виде спектральных и сингулярных разложений обратных грамианов управляемости и наблюдаемости. Это позволяет получить инвариантные разложения энергетических функционалов и сформулировать новые критерии устойчивости линейных систем с учетом нелинейных эффектов взаимодействия мод.

Решается задача разработки и моделирования алгоритма адаптивного управления неустойчивым вертикальным положением плазмы в вертикально вытянутом токамаке, где на каждой итерации для изменяющейся модели плазмы, идентифицированной методом наименьших квадратов (МНК), автоматически синтезировался новый ПИД-регулятор. Параметры регулятора в обратной связи вычислялись посредством заданного расположения полюсов замкнутой системы управления в левой полуплоскости комплексной плоскости. В качестве начальной модели системы управления использовалась робастная система, синтезированная с помощью теории количественной обратной связи (Quantitative Feedback Theory - QFT). Система была промоделирована на цифровом стенде реального времени (https://www. ipu. ru/plasma/about).

В этом специальном выпуске представлены избранные доклады 15-й Международной конференции “Управление развитием крупномасштабных систем (MLSD 2022)”, состоявшейся 26–28 сентября 2022 г.
Статистика статьи
Статистика просмотров за 2025 год.
Издательство
- Издательство
- ИППИ РАН
- Регион
- Россия, Москва
- Почтовый адрес
- Большой Каретный пер., 19, стр. 1
- Юр. адрес
- Большой Каретный пер., 19, стр. 1
- ФИО
- Соболевский Андрей Николаевич (Директор)
- E-mail адрес
- director@iitp.ru
- Контактный телефон
- +7 (495) 6504274
- Сайт
- http:/iitp.ru