Рассматриваются задачи управления многономенклатурными запасами в иерархических системах складов при постоянном спросе в условиях ограниченной вместимости складов. Снабжение системы складов может производиться несколькими поставщиками. Для решения этих задач предлагаются модели и методы, позволяющие в соответствии с имеющимся спросом определять время и величину пополнения всех складов, находящихся на различных уровнях такой системы складов.
Предпросмотр статьи
Идентификаторы и классификаторы
Для цитирования:
ХОБОТОВ Е. Н., АВЕРЬЯНОВА Е. Е. ЗАДАЧИ И МЕТОДЫ УПРАВЛЕНИЯ ЗАПАСАМИ В ИЕРАРХИЧЕСКОЙ СИСТЕМЕ СКЛАДОВ // АВТОМАТИКА И ТЕЛЕМЕХАНИКА. 2023. № 12
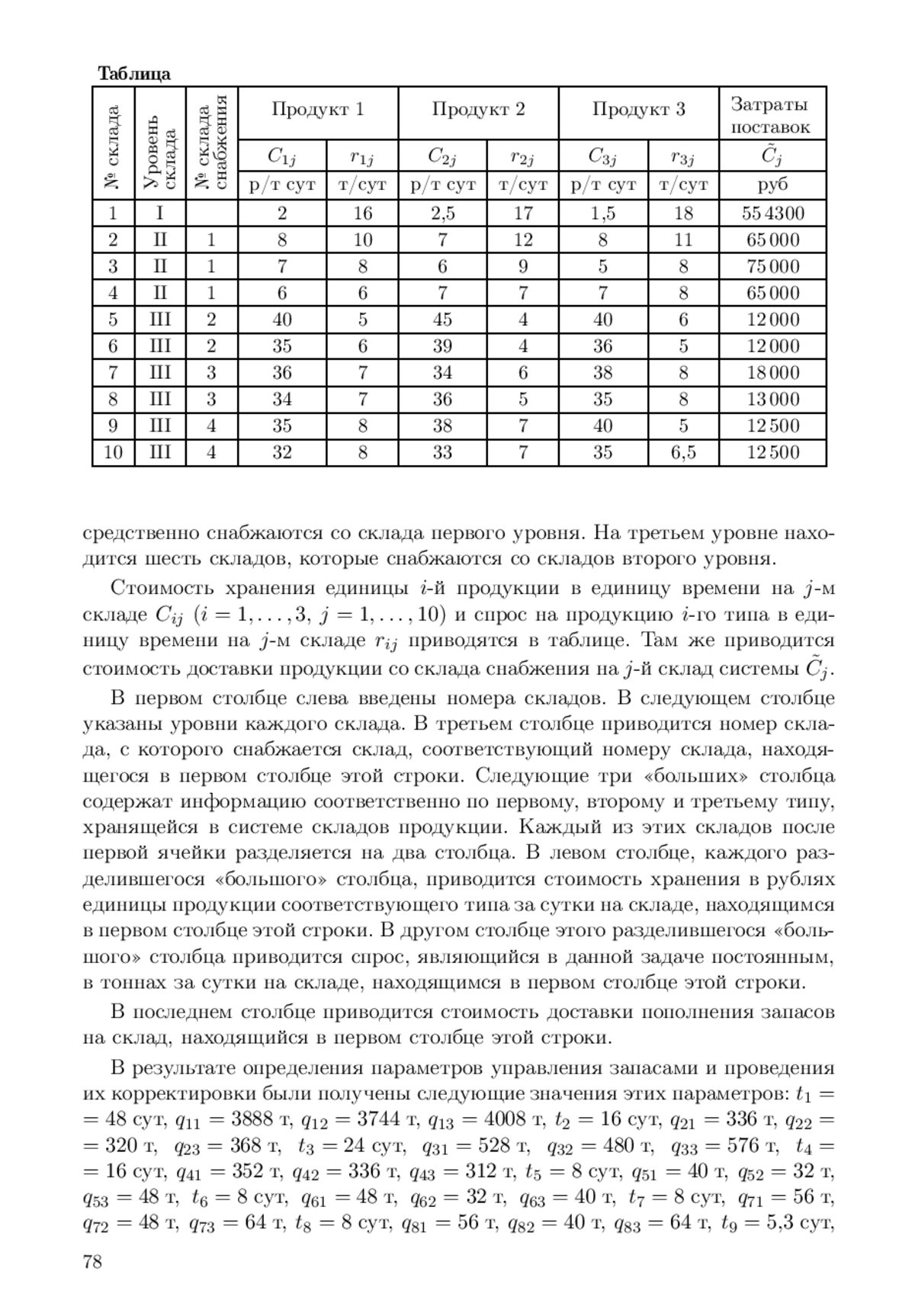
Текстовый фрагмент статьи